運(yùn)動(dòng)控制器結(jié)構(gòu):解析核心組成與工作原理
運(yùn)動(dòng)控制器結(jié)構(gòu):解析核心組成與工作原理
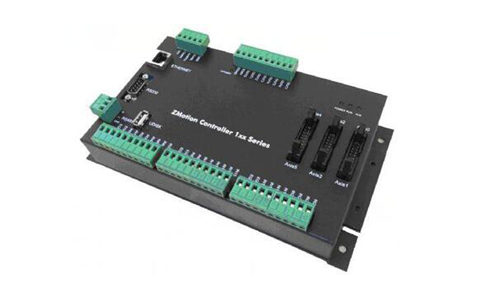
運(yùn)動(dòng)控制器是現(xiàn)代自動(dòng)化領(lǐng)域中不可或缺的關(guān)鍵設(shè)備之一,廣泛應(yīng)用于機(jī)器人、數(shù)控機(jī)床、自動(dòng)化生產(chǎn)線等場(chǎng)景。它主要負(fù)責(zé)指揮執(zhí)行機(jī)構(gòu)按照預(yù)定的軌跡和速度進(jìn)行運(yùn)動(dòng),從而實(shí)現(xiàn)精確的動(dòng)作控制。本文將詳細(xì)解析運(yùn)動(dòng)控制器的基本結(jié)構(gòu)及其各組成部分的功能,幫助讀者深入了解這一重要設(shè)備的工作原理。

運(yùn)動(dòng)控制器的核心結(jié)構(gòu)
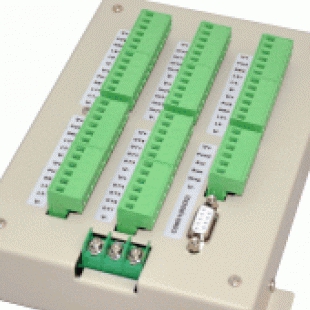
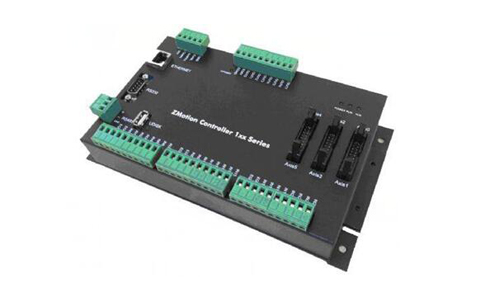
運(yùn)動(dòng)控制器的核心結(jié)構(gòu)一般由以下幾個(gè)部分組成:z央處理單元(CPU)、輸入輸出模塊、通信接口、控制算法模塊、驅(qū)動(dòng)模塊以及電源模塊等。
1. z央處理單元(CPU)
z央處理單元是運(yùn)動(dòng)控制器的大腦,負(fù)責(zé)接收外部指令并進(jìn)行計(jì)算、處理。在現(xiàn)代運(yùn)動(dòng)控制系統(tǒng)中,CPU不僅需要執(zhí)行實(shí)時(shí)控制,還要處理大量的數(shù)據(jù)和復(fù)雜的控制算法。高速的處理能力是運(yùn)動(dòng)控制器能夠?qū)崟r(shí)響應(yīng)外部信號(hào)、精確控制設(shè)備運(yùn)動(dòng)的基礎(chǔ)。
2. 輸入輸出模塊
輸入輸出模塊是運(yùn)動(dòng)控制器與外部設(shè)備的橋梁,主要負(fù)責(zé)接收傳感器等外部設(shè)備的信號(hào),并將控制指令輸出到驅(qū)動(dòng)裝置。輸入模塊常常包括位置傳感器、速度傳感器、加速度傳感器等設(shè)備,輸出模塊則通過電流、電壓或脈沖信號(hào)控制伺服電機(jī)等執(zhí)行元件。
3. 控制算法模塊
控制算法模塊是運(yùn)動(dòng)控制器中至關(guān)重要的一部分,主要負(fù)責(zé)運(yùn)動(dòng)軌跡的規(guī)劃與控制精度的實(shí)現(xiàn)。常見的運(yùn)動(dòng)控制算法有PID控制、模糊控制和自適應(yīng)控制等。這些算法確保控制器能夠根據(jù)實(shí)時(shí)反饋調(diào)整輸出,保證運(yùn)動(dòng)軌跡的精確性與穩(wěn)定性。
4. 通信接口
現(xiàn)代運(yùn)動(dòng)控制器通常支持多種通信接口,如CAN、Ethernet、Modbus等,這些接口使得控制器能夠與其他設(shè)備或上位機(jī)進(jìn)行數(shù)據(jù)交換和遠(yuǎn)程操作。通信接口的選擇影響著整個(gè)系統(tǒng)的擴(kuò)展性和數(shù)據(jù)傳輸效率,因此需要根據(jù)應(yīng)用場(chǎng)景進(jìn)行合理選擇。
5. 驅(qū)動(dòng)模塊
驅(qū)動(dòng)模塊是將運(yùn)動(dòng)控制器的指令轉(zhuǎn)化為實(shí)際的機(jī)械運(yùn)動(dòng)的部分。通過控制電機(jī)驅(qū)動(dòng)器、伺服電機(jī)等執(zhí)行機(jī)構(gòu),驅(qū)動(dòng)模塊能夠?qū)崿F(xiàn)精確的定位、速度控制以及加速/減速控制。驅(qū)動(dòng)模塊的性能直接影響系統(tǒng)的響應(yīng)速度和精度,因此通常要求具備較高的精度和可靠性。
6. 電源模塊
電源模塊為整個(gè)運(yùn)動(dòng)控制器系統(tǒng)提供穩(wěn)定的電力支持,確保各個(gè)模塊能夠正常工作。電源模塊的設(shè)計(jì)要考慮到系統(tǒng)功率的需求,以及電壓、電流等參數(shù)的匹配,以避免電力波動(dòng)對(duì)控制系統(tǒng)造成影響。
運(yùn)動(dòng)控制器的工作原理
運(yùn)動(dòng)控制器通過接收外部輸入信號(hào)(如傳感器信號(hào)),并通過控制算法處理后,計(jì)算出需要輸出的控制指令。這些指令經(jīng)過驅(qū)動(dòng)模塊轉(zhuǎn)化為機(jī)械運(yùn)動(dòng),從而實(shí)現(xiàn)預(yù)定的任務(wù)。整個(gè)過程需要在實(shí)時(shí)性要求極高的條件下完成,因此,運(yùn)動(dòng)控制器通常具備強(qiáng)大的實(shí)時(shí)計(jì)算能力和高精度的反饋控制能力。
結(jié)語
運(yùn)動(dòng)控制器作為自動(dòng)化系統(tǒng)的核心組成部分,其結(jié)構(gòu)和性能直接影響系統(tǒng)的整體效率與精度。隨著技術(shù)的不斷進(jìn)步,運(yùn)動(dòng)控制器在精度、速度和穩(wěn)定性方面不斷突破,已廣泛應(yīng)用于各類高精度工業(yè)和科研領(lǐng)域。深入理解運(yùn)動(dòng)控制器的結(jié)構(gòu)與工作原理,有助于提升系統(tǒng)設(shè)計(jì)與優(yōu)化的水平,實(shí)現(xiàn)更高效、更智能的自動(dòng)化控制。
全部評(píng)論(0條)
推薦閱讀
-
- 運(yùn)動(dòng)控制器結(jié)構(gòu):解析核心組成與工作原理
- 運(yùn)動(dòng)控制器作為工業(yè)自動(dòng)化領(lǐng)域中至關(guān)重要的設(shè)備,其在執(zhí)行高精度運(yùn)動(dòng)控制任務(wù)時(shí),起著不可替代的作用。無論是在機(jī)器人、數(shù)控機(jī)床還是其他自動(dòng)化設(shè)備中,運(yùn)動(dòng)控制器的穩(wěn)定運(yùn)行直接影響到生產(chǎn)效率和產(chǎn)品質(zhì)量。
-

- 紅外熱像儀結(jié)構(gòu):深入解析其核心組成與工作原理
- 紅外熱像儀作為一種重要的檢測(cè)工具,廣泛應(yīng)用于工業(yè)、建筑、電力、機(jī)械設(shè)備等領(lǐng)域,憑借其能夠?qū)崟r(shí)、非接觸式地獲取物體表面溫度分布圖像的優(yōu)勢(shì),發(fā)揮著不可或缺的作用。
-
- 半導(dǎo)體激光器結(jié)構(gòu):解析核心原理與設(shè)計(jì)
- 半導(dǎo)體激光器作為現(xiàn)代光電技術(shù)的重要組成部分,廣泛應(yīng)用于通信、醫(yī)療、工業(yè)加工等多個(gè)領(lǐng)域。為了確保其在高效穩(wěn)定的狀態(tài)下長期運(yùn)行,定期的保養(yǎng)維護(hù)顯得尤為重要。
-
- 運(yùn)動(dòng)控制器工作原理
- 運(yùn)動(dòng)控制器作為工業(yè)自動(dòng)化領(lǐng)域中至關(guān)重要的設(shè)備,其在執(zhí)行高精度運(yùn)動(dòng)控制任務(wù)時(shí),起著不可替代的作用。
-

- 紅外相機(jī)結(jié)構(gòu):深入解析其核心組件與工作原理
- 紅外相機(jī)作為一種高端電子設(shè)備,廣泛應(yīng)用于夜間監(jiān)控、安防檢測(cè)、建筑檢查等多個(gè)領(lǐng)域。為了確保紅外相機(jī)能夠長期穩(wěn)定地運(yùn)行,定期的保養(yǎng)與維護(hù)至關(guān)重要。
-

- 色度儀結(jié)構(gòu):解析色度儀的組成與工作原理
- 色度儀作為一種重要的色彩測(cè)量工具,廣泛應(yīng)用于各行各業(yè),尤其是在涂料、塑料、食品、紡織等領(lǐng)域。色度儀的性能直接影響到色彩檢測(cè)的準(zhǔn)確性,因此,對(duì)色度儀的定期保養(yǎng)與維護(hù)至關(guān)重要。
-

- CCD相機(jī)結(jié)構(gòu)解析:深入了解CCD技術(shù)的核心組成與工作原理
- CCD相機(jī)按照其應(yīng)用領(lǐng)域不同,分為工業(yè)相機(jī)以及科學(xué)級(jí)相機(jī)兩大種。CCD相機(jī)主要應(yīng)用與生物科學(xué)、天文學(xué)、化學(xué)成像、生物成像、熒光纖維成像、高速攝影等領(lǐng)域。
-
- 運(yùn)動(dòng)控制器功能解析
- 運(yùn)動(dòng)控制器作為工業(yè)自動(dòng)化領(lǐng)域中至關(guān)重要的設(shè)備,其在執(zhí)行高精度運(yùn)動(dòng)控制任務(wù)時(shí),起著不可替代的作用。
-

- 頂空進(jìn)樣器組成:詳解結(jié)構(gòu)與工作原理
- 頂空進(jìn)樣器的基本工作原理是通過加熱和攪拌樣品,使揮發(fā)性有機(jī)物從樣品中揮發(fā)并進(jìn)入樣品瓶的氣相空間。接著,通過樣品進(jìn)樣裝置將氣相中的揮發(fā)物導(dǎo)入氣相色譜儀進(jìn)行檢測(cè)分析。
-

- COD測(cè)定儀結(jié)構(gòu):理解水質(zhì)檢測(cè)設(shè)備的核心組成與工作原理
- COD測(cè)定儀作為水質(zhì)檢測(cè)的重要工具,其結(jié)構(gòu)與工作原理緊密相連。通過對(duì)反應(yīng)器、光度計(jì)、自動(dòng)進(jìn)樣系統(tǒng)、數(shù)據(jù)處理系統(tǒng)等核心部件的綜合作用,COD測(cè)定儀能夠快速、準(zhǔn)確地測(cè)量水樣中的化學(xué)需氧量。
-

- 光澤度儀結(jié)構(gòu)解析:深入了解光澤度儀的組成與工作原理
- 光澤度儀作為測(cè)試物體表面光澤度的專業(yè)儀器,廣泛應(yīng)用于涂料、塑料、金屬等行業(yè)。為了確保測(cè)量數(shù)據(jù)的準(zhǔn)確性與儀器的長期穩(wěn)定性,定期保養(yǎng)光澤度儀顯得尤為重要。
-

- 卡氏水分測(cè)定儀結(jié)構(gòu):全面解析其組成與工作原理
- 卡氏水分測(cè)定儀憑借其高精度和可靠性,已成為各行各業(yè)水分檢測(cè)的重要工具。通過深入理解其結(jié)構(gòu)與工作原理,能夠幫助相關(guān)領(lǐng)域的專業(yè)人員更好地應(yīng)用這一儀器,提高工作效率與檢測(cè)精度。
-
- 分子熒光光譜儀的結(jié)構(gòu):原理與組成解析
- 分子熒光光譜儀憑借其高靈敏度、快速分析等特點(diǎn),在各類科學(xué)研究和工業(yè)應(yīng)用中占有重要地位。其結(jié)構(gòu)中每一部分都在光譜測(cè)量中發(fā)揮著不可或缺的作用。
-
- 紅外顯微鏡的核心結(jié)構(gòu)組成
- 紅外顯微鏡是一種精密的光學(xué)儀器,廣泛應(yīng)用于材料分析、生命科學(xué)、半導(dǎo)體研究等領(lǐng)域。為了確保其長期高效穩(wěn)定運(yùn)行,正確的保養(yǎng)與維護(hù)至關(guān)重要。
-

- 視頻顯微鏡結(jié)構(gòu):深入解析其核心構(gòu)造與應(yīng)用
- 視頻顯微鏡是現(xiàn)代科研、電子制造、工業(yè)檢驗(yàn)等領(lǐng)域中常用的重要儀器,具備高分辨率、高精度、以及便捷的影像輸出功能。為了確保其始終在良好狀態(tài)下工作,延長使用壽命,日常的維護(hù)與保養(yǎng)至關(guān)重要。
-
- 旋光儀結(jié)構(gòu)及其工作原理解析
- 旋光儀作為一種精密儀器,廣泛應(yīng)用于化學(xué)、藥學(xué)、食品科學(xué)等領(lǐng)域,用于測(cè)量溶液的旋光度。為了確保旋光儀在長期使用中的準(zhǔn)確性與穩(wěn)定性,定期的保養(yǎng)與維護(hù)至關(guān)重要。
-

- 糖度儀結(jié)構(gòu):深入解析其工作原理與構(gòu)造
- 糖度儀是廣泛應(yīng)用于食品、飲料、農(nóng)業(yè)等領(lǐng)域的重要測(cè)量工具,能夠精確地測(cè)定溶液中的糖分濃度。為了確保糖度儀能夠長期穩(wěn)定地工作并提供準(zhǔn)確的測(cè)量結(jié)果,定期的保養(yǎng)與維護(hù)是不可或缺的。
-

- 激光干涉儀結(jié)構(gòu):工作原理與設(shè)計(jì)要素解析
- 激光干涉儀是一種高精度的測(cè)量設(shè)備,廣泛應(yīng)用于科研、工程檢測(cè)和物理實(shí)驗(yàn)等領(lǐng)域。由于其工作原理涉及激光光束的干涉現(xiàn)象,任何微小的誤差或設(shè)備問題都可能導(dǎo)致測(cè)量結(jié)果的偏差。
-

- 橢偏儀結(jié)構(gòu)解析:工作原理與應(yīng)用
- 橢偏儀作為精密的光學(xué)測(cè)量儀器,廣泛應(yīng)用于材料科學(xué)、半導(dǎo)體、薄膜技術(shù)以及生物醫(yī)學(xué)等領(lǐng)域。為了確保橢偏儀能夠長期穩(wěn)定運(yùn)行并維持其高精度的測(cè)量能力,日常保養(yǎng)和維護(hù)至關(guān)重要。
-
- 透射電鏡結(jié)構(gòu):深入解析其工作原理與應(yīng)用
- 透射電鏡作為一種高精度的科研儀器,廣泛應(yīng)用于材料學(xué)、生命科學(xué)、納米技術(shù)等領(lǐng)域。其高分辨率的成像能力使其成為科研工作者進(jìn)行微觀結(jié)構(gòu)分析的重要工具。

①本文由儀器網(wǎng)入駐的作者或注冊(cè)的會(huì)員撰寫并發(fā)布,觀點(diǎn)僅代表作者本人,不代表儀器網(wǎng)立場(chǎng)。若內(nèi)容侵犯到您的合法權(quán)益,請(qǐng)及時(shí)告訴,我們立即通知作者,并馬上刪除。
②凡本網(wǎng)注明"來源:儀器網(wǎng)"的所有作品,版權(quán)均屬于儀器網(wǎng),轉(zhuǎn)載時(shí)須經(jīng)本網(wǎng)同意,并請(qǐng)注明儀器網(wǎng)(www.shangjinews.cn)。
③本網(wǎng)轉(zhuǎn)載并注明來源的作品,目的在于傳遞更多信息,并不代表本網(wǎng)贊同其觀點(diǎn)或證實(shí)其內(nèi)容的真實(shí)性,不承擔(dān)此類作品侵權(quán)行為的直接責(zé)任及連帶責(zé)任。其他媒體、網(wǎng)站或個(gè)人從本網(wǎng)轉(zhuǎn)載時(shí),必須保留本網(wǎng)注明的作品來源,并自負(fù)版權(quán)等法律責(zé)任。
④若本站內(nèi)容侵犯到您的合法權(quán)益,請(qǐng)及時(shí)告訴,我們馬上修改或刪除。郵箱:hezou_yiqi


參與評(píng)論
登錄后參與評(píng)論